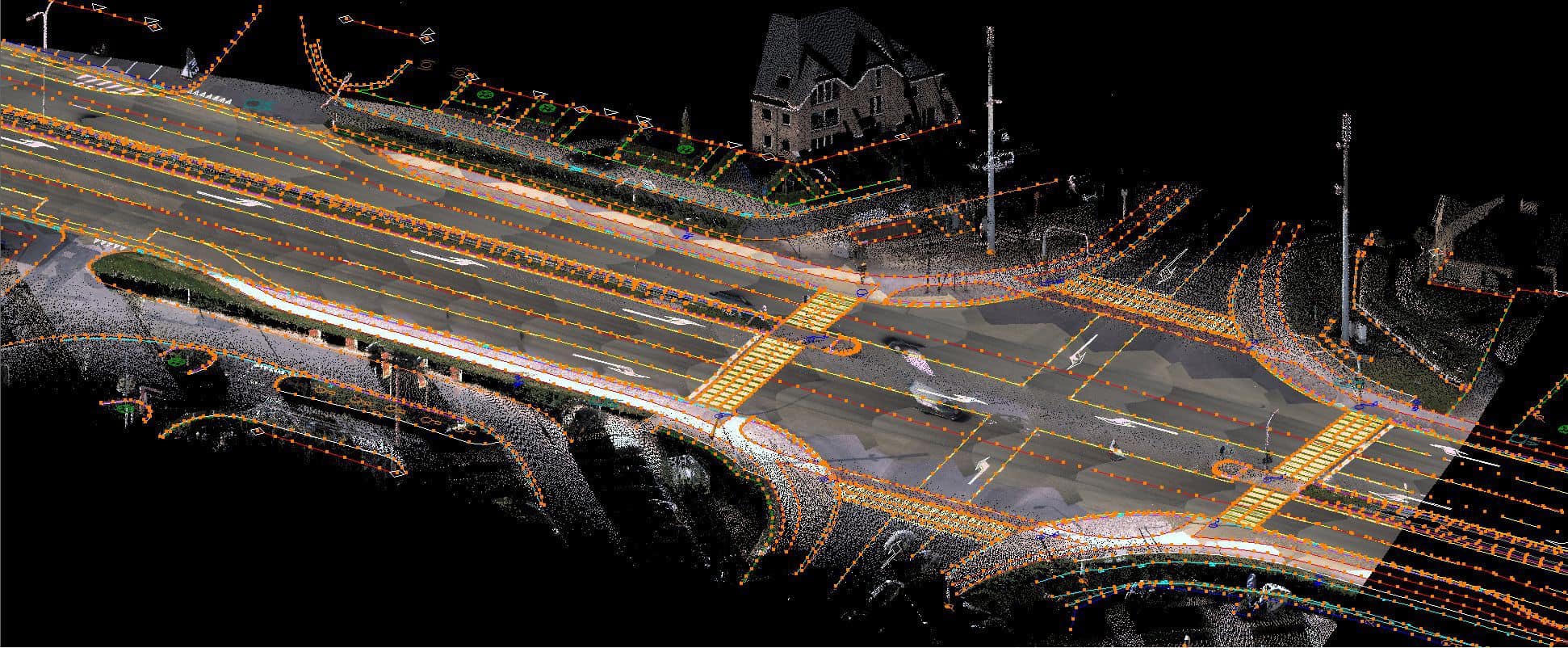
Civil Maps, une startup de San Francisco qui développe une technologie de carte en haute définition pour les voitures autonomes, a décidé de nous montrer ce qui se passe lorsque l’on combine ses cartes 3D détaillées avec les données des capteurs, des caméras optiques ainsi que des autres composants des voitures sans chauffeurs.
Anuj Gupta, le chef de produit de Civil Maps explique que sa technologie localise en 6D (comme la réalité virtuelle) son environnement. C’ est à dire qu’en plus des trois dimensions classiques (la largeur, la hauteur et la profondeur) la voiture localise sont environnement en prenant en compte les axes de rotation et de déplacement. Voilà ce qu’apporte en plus cette technologie, un outil cognitif pour aider à la sensibilisation de l’environnement et à la prise de décision.
Inscrivez-vous à la newsletter
En vous inscrivant vous acceptez notre politique de protection des données personnelles.
Sans localisation en 6 dimensions, les projections des objets physiques ne seront pas alignés avec précision par les capteurs LiDAR des voitures. Il faudrait ainsi à chaque fois re-paramétrer les cartes sémantique, ce qui rendrait les trajets moins confortables et amenuiserait la marge de sécurité des systèmes et donc pourrait avoir des conséquences désastreuses.
Cette démonstration a pour but de mettre en avant la technologie Civil Maps bien sur, mais elle pourrait réellement faire faire des économies de calcul et d’achat de capteurs en plus à un constructeur automobile. En atteste cette vidéo qui met en scène cette technologie dans le Michigan .