Pour mieux comprendre l’environnement qui les entoure, les robots ont besoin d’appréhender la sensation du toucher. Sans cette capacité, ils ne pourront jamais déplacer d’objets fragiles. C’est pour cette raison que le MIT a développé une « pince molle« , baptisée Origami Robot Gripper. Un robot doté de la sensation du toucher et d’une meilleure conscience de l’espace.
Acquérir la sensation du toucher pour appréhender l’espace
Les équipes qui travaillent sur la robotique au laboratoire CSAIL, la division spécialisée dans l’intelligence artificielle au Massachusetts Institute of Technology, ont imaginé des capteurs qui ressemblent à un ballon gonflable. Ils parlent d’une « pince molle ». Ils ont fait en sorte de permettre à ce robot de mieux sentir ce qu’ils saisit et de contrôler la force qu’il doit utiliser dans chaque situation.
Inscrivez-vous à la newsletter
En vous inscrivant vous acceptez notre politique de protection des données personnelles.
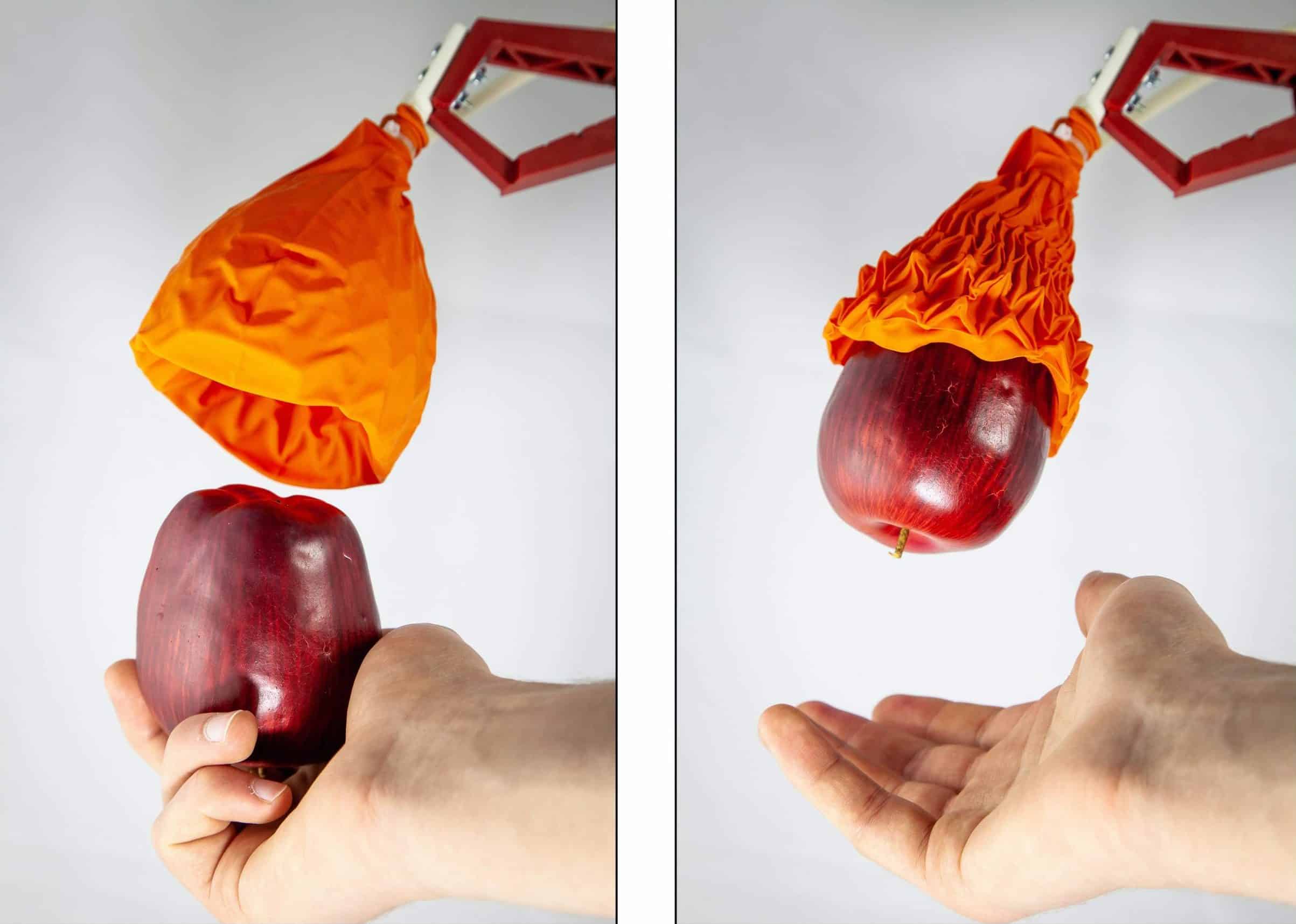
Deux innovations sont à l’ordre du jour : ces fameux ballons gonflables qui servent de capteurs aux robots et une pince conçue pour saisir des objets cent fois plus lourds que son propre poids. Cette pince a été améliorée avec des capteurs qui lui permettent de déterminer le poids d’un objet et donc de mettre un certain degré de pression au moment de le saisir et de le soulever. Démonstration :
Dans les deux cas, un algorithme utilise les informations envoyées par les capteurs pour indiquer au robot le degré de force à utiliser. Les chercheurs ont testé leurs innovations sur des bouteilles en plastique, des boîtes de conserve, des pommes, une brosse à dents ou encore un paquet de biscuits. Selon Josie Hughes, auteur principal des recherches :
« Nous espérons que cette innovation pourra devenir une nouvelle méthode de détection douce et s’appliquer à un large panel d’applications différentes dans des contextes de fabrication, comme l’emballage de produits par exemple ».
Des robots de plus en plus humains ?
Au fil des années, les robots s’améliorent et se rapprochent des capacités humaines. Au début de l’année 2020, le roboticien T.J. Wallin dévoilait ses recherches sur la transpiration des robots. Il est convaincu que les robots doivent également acquérir cette capacité pour éviter la surchauffe lorsqu’ils travailleront pendant de longues heures d’affilées. De petits réservoirs creux et pressurisés sont placés à l’intérieur des doigts d’une main robotique. Le principe est très simple : lorsque le plastique atteint une certaine température, les pores s’ouvrent et l’eau est poussée à la surface, de la même manière que chez l’homme.
Il y a quelques semaines, le MIT dévoilait de nouveaux capteurs qui pourraient servir de peau pour les robots. Preuve que les chercheurs du CSAIL cherchent depuis un petit moment un moyen d’offrir la sensation du toucher aux robots. Cette fois-ci, ils cherchaient à recouvrir les robots d’une sorte de tronc souple et équipé de capteurs fabriqués à partir d’un matériau utilisé pour le « blindage contre les interférences électromagnétiques ».